미쓰비시 서보 드라이버 R시리즈 RD77MS4/RD77MS8/RD77MS16 심플모션 한글 매뉴얼 다운로드 링크
https://imnotarobot.tistory.com/66
1. 서보드라이버의 역할?
모터의 토크 제어 / 속도 제어/ 위치 제어를 하는 장치
( = 즉, 서보모터를 움직이는 전력장치)
이와 같은 제어를 하기 위해 전류, 엔코더 신호를 피드백 입력으로 받는다.
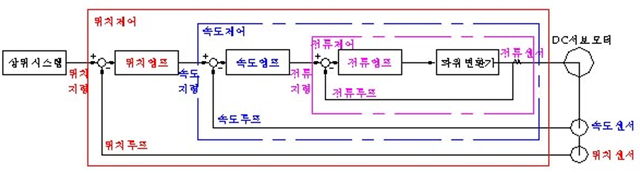
2. 서보드라이버의 구성
서보 드라이버는 크게 1) 서보 모터에 파워를 공급하는 파워 변환기 2) 전류제어부 3)속도제어부 4)위치제어부
에 의해 구성된다.
3. 서보 모터의 종류
서보 모터의 종류는 크게 3가지가 있다.
DC 모터, AC서보모터, SM형 AC서보모터.
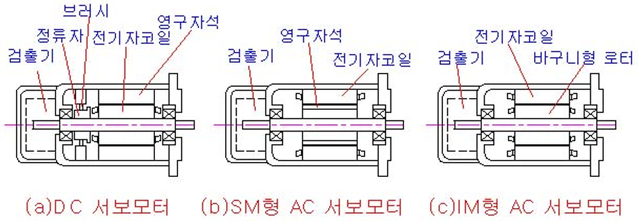
1) DC Servo Motor
고정자측 구성은 자로 및 기계적 지지를 목적으로 하는 원통형의 프레임과 프레임 내경에는 자석이 부착되어 있다.
회전자측 구성은 샤프트와 샤프트 외경에 정류자 및 회전자 철심이 부착되어 있고 회전자 철심내에 전기자 권선(Coil)이 감겨져 있다.
전기자 권선에 정류자를 통하여 전류를 공급하는 브러시(Brush) 및 브러시(Brush Holder) 홀더가 부착되어 있다.
Bracket과 Flange에는 Bal Bearing이 있어서 회전자를 받쳐주고 있다. Bracket뒤쪽에는 회전속도신호를 검출하는 검출기가 회전자와 연결되어있는데 광학식 인코더 혹은 타고 제너레이터를 많이 사용한다.
DC Servo Motor는 토크와 전류가 비례하여 선형 제어계의 구성이 가능하므로 비교적 간단한 회로로 안정된 제어계 설계가 가능하다.
DC Servo Motor는 최고 속도와 그 점에서의 허용 토크는 정류 불꽃에 의해 제약을 받는다.
DC Servo Motor의 구동 방식은 트랜지스터에 의한 펄스폭 변조방식이 주류를 이룬다.
이 방식은 사용 주파수 전원을 정류하여 직류를 얻어 이 직류 전원이 모터에 인가되는 시간폭을 주파수의 반송파에 의해 변화되어 가변 전압을 만들어 모터의 속도 제어를 행한다.
이런 방식의 제어는 응답성이 좋고 부하 마찰 토크가 국부적으로 변화하므로 다관절 로봇과 같이 자세에 의한 모터축 환산부하 관성이 크게 변하는 계에서도 충분히 안정된 제어를 행할수 있다.
2) 동기기형 AC Servo Motor
고정자측 구성은 기계적지지를 목적으로 하는 원통형의 프레임과 프레임 내경에 원통형의 고정자 코어(Stator Core)가 있고 코어에 전기자 권선이 감겨져 있다.권선 끝단에는 리드선이 나와 있어서 이 리드선으로 부터 전류및 전압이 공급된다.
회전자측 구성은 샤프트와 샤프트 외경에 자석이 부착되어 있다. 양쪽 브라켓 및 플랜지에는 볼 베어링이 부착되어 있다. 동기기형 AC 서보 모터는 DC서보모터와 반대로 자석이 회전자에 부착되어 있고 전기자 권선은 고정자측에 감겨져 있다. 따라서 정류자나 커뮤니케이터 없이도 외부로부터 직접 전원을 공급받을수 있는 구조이기때문에 브러시러스 DC 서보모터라고도 한다.
동기기형 AC 서보모터도 DC 서보모터와 마찬가지로 광학식 인코더나 리졸버를 회전속도 검출기로 사용한다. 동기기형 AC 서보모터는 회전자에 자석, 즉 페라이트 자석 혹은 희토류(Rare Earth)자석을 사용하여 계자 역할을 한다.
동기기형 AC서보모터는 전기자 잔류와 토오크의 관계가 선형이므로 제동이 용이하고 비상정지시에 다이나믹 브레이크가 작동한다. 그러나 회전자에 영구자석을 사용하는 구조이므로 복잡하고 제어시 회전자 위치를 검출해야 할 필요가 있다. 또한 드라이브로부터의 전기자 전류에는 고주파 성분이 포함되어 있어서 토크리플(Torque Ripple) 및 진동의 원인이 되는 경우가 있다.
3) 유도기형 AC Servo Motor
유도기형 AC서보모터의 구조는 일반 유도기(Induction Motor)의 구조와 똑같다.
즉, 고정자측은 프레임, 고정자 코어, 전기자 권선,리드선으로 구성되어 있고, 회전자는 샤프트, 회전자 코어, 그리고 코어 외경에 도전체(Conductor)가 조립되어 있다.
컨덕터는 코어 외경에 축 방향으로 경사지게 많은 슬롯이 나 있는데 링 형상의 코어 양단면과 슬롯에는 순도 높은 알루미늄 봉이 차 있어서 바구니 모양과 비슷하다.
유도기의 경우 회전자와 고정자의 상대적인 위치 검출 센서가 필요치 않다.
유도기형은 회전자 구조가 간단하고 검출기도 특수한 것이필요없다. 그러나 정지시에도 여자전류를 계속 흘려야 하므로 것에 의한 발열 손실과 비상정지시에 DC서보모터와 같이 전기자 권선을 단락하여 다이나믹 브레이크를 걸어주는것이 불가능한것 등의 결점이 있다.
'은밀한 취미생활 > PLC' 카테고리의 다른 글
| [통신] 이더넷(Ethernet)이란? (0) | 2024.12.13 |
|---|---|
| 전자캠, 캠 포지셔너 (Cam Positioner)란? (1) | 2024.12.11 |
| [자료] IQ-R 심플모션유닛, 미쓰비시 서보드라이버(Servo Drive)R시리즈 RD77MS4/RD77MS8/RD77MS16 심플모션 매뉴얼 (0) | 2024.10.16 |
| 제 1장 PLC란 무엇인가? (2) | 2024.10.11 |


